Tenny Yin
Hi! I am a second-year PhD student at Princeton advised by Prof. Ani Majumdar. I work on safe and reliable robotic systems that can operate alongside humans.
Previously, I received my B.S. in Computer Science and Electrical and Computer Engineering at Cornell University, where I worked with Prof. Hadas Kress-Gazit on verifiable robotics and Prof. Bharath Hariharan on visual navigation.
Selected Publications

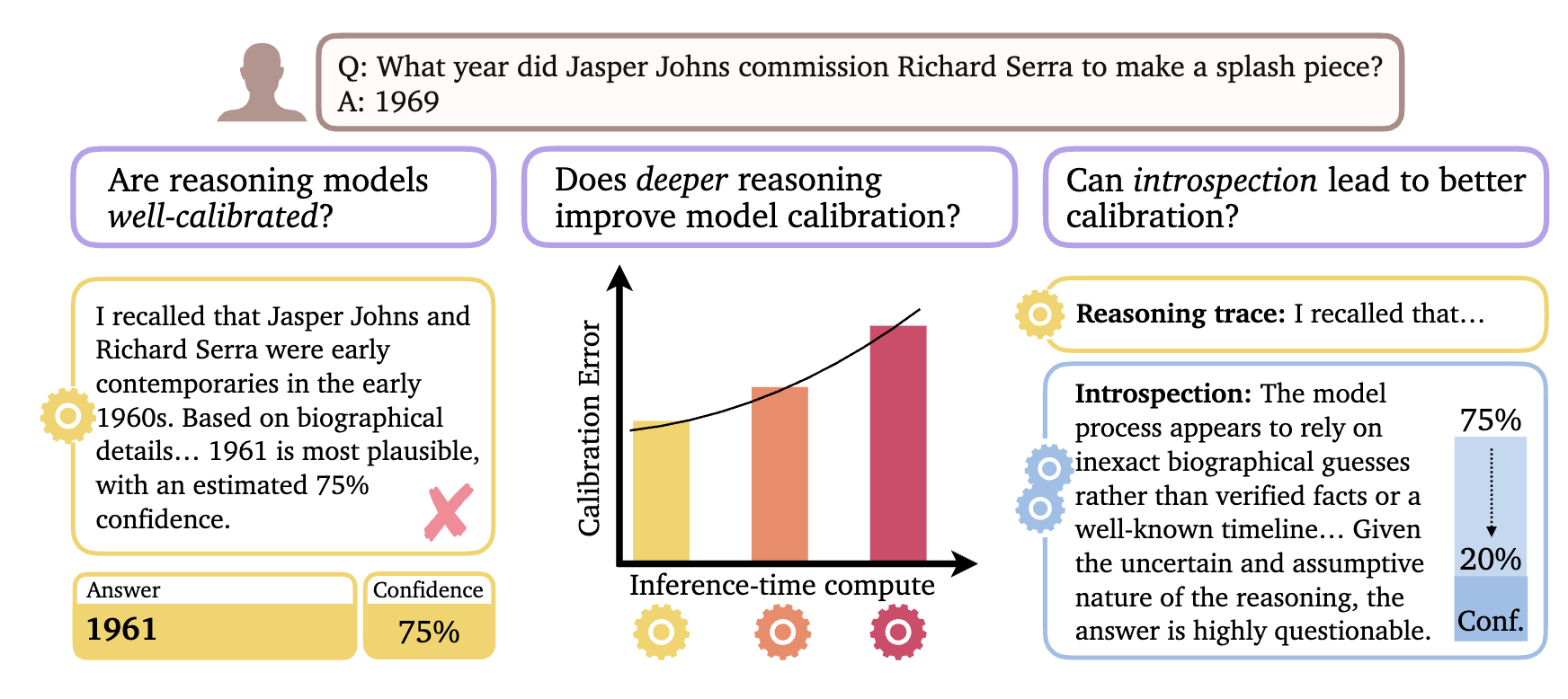
Reasoning about Uncertainty: Do Reasoning Models Know When They Don't Know?
Conference of the European Chapter of the Association for Computational Linguistics (EACL), 2025

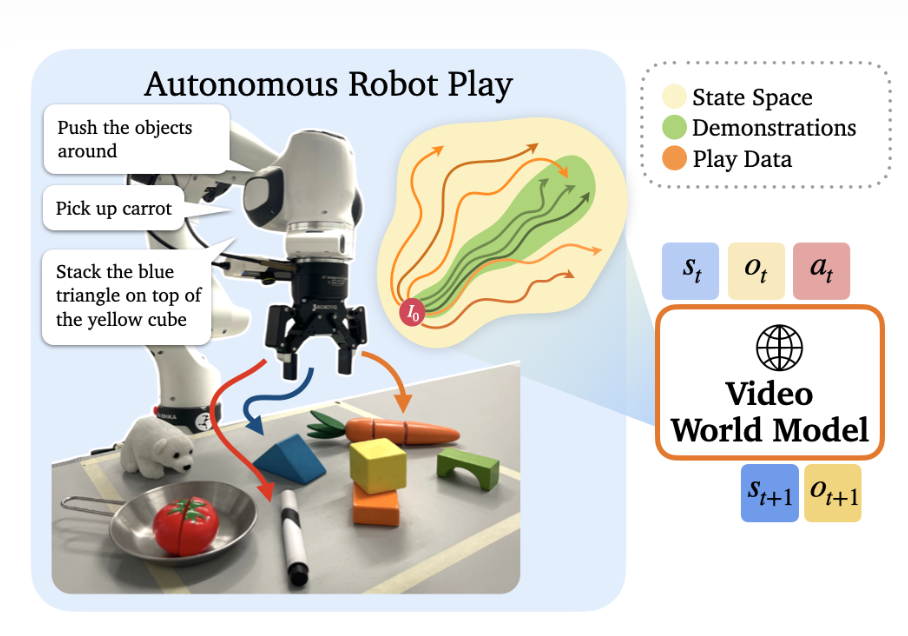
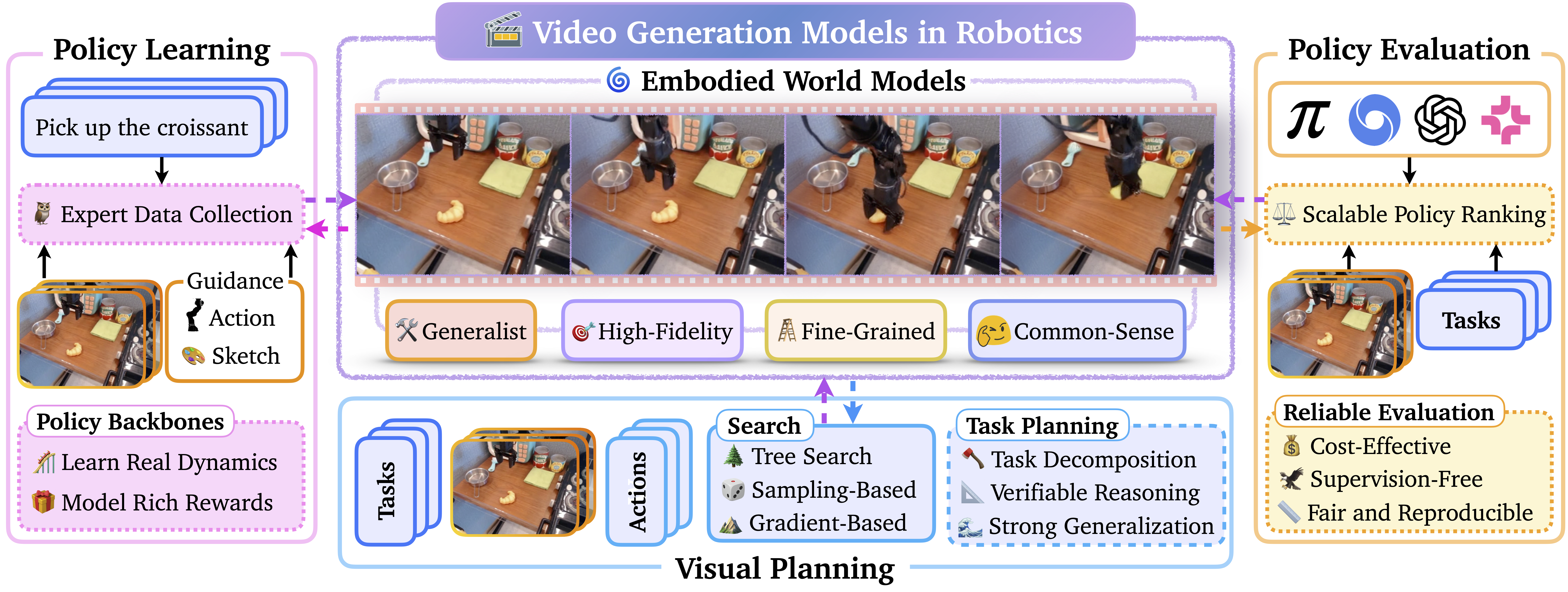
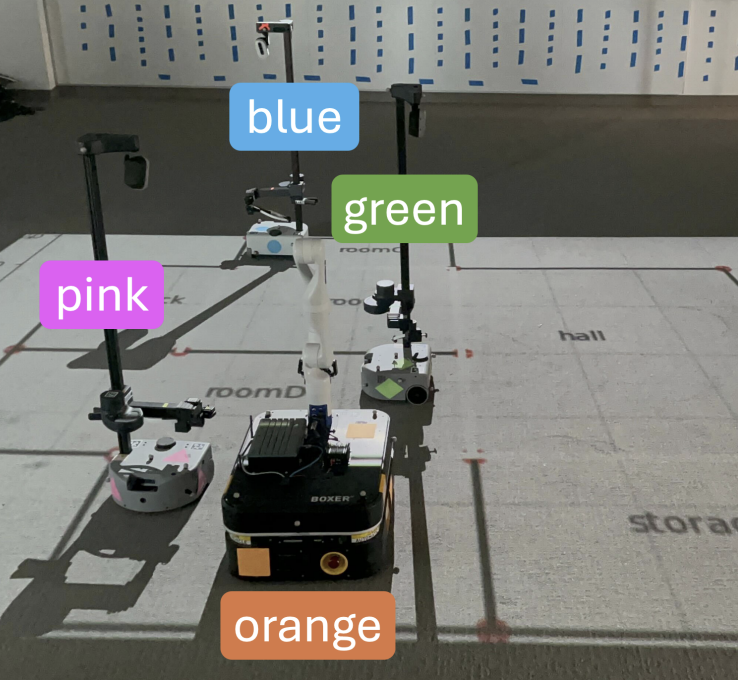
WoMAP: World Models For Embodied Open-Vocabulary Object Localization
Conference on Robot Learning (CoRL), 2025
🏆 Best Paper Award, RSS 2025 SWoMo and SemRob Workshops
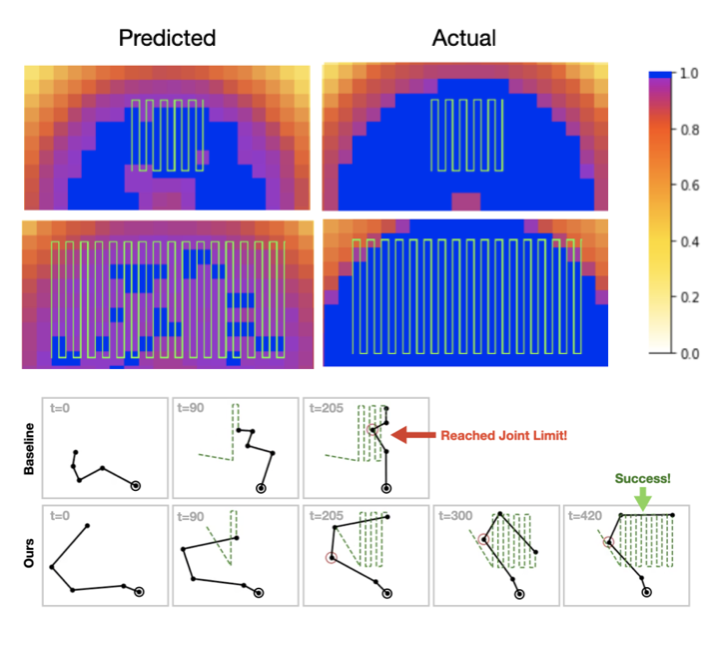
Robust Task-Based Design of Modular Manipulators With Single Joint Failure
IEEE International Conference on Automation Science and Engineering (CASE), 2025
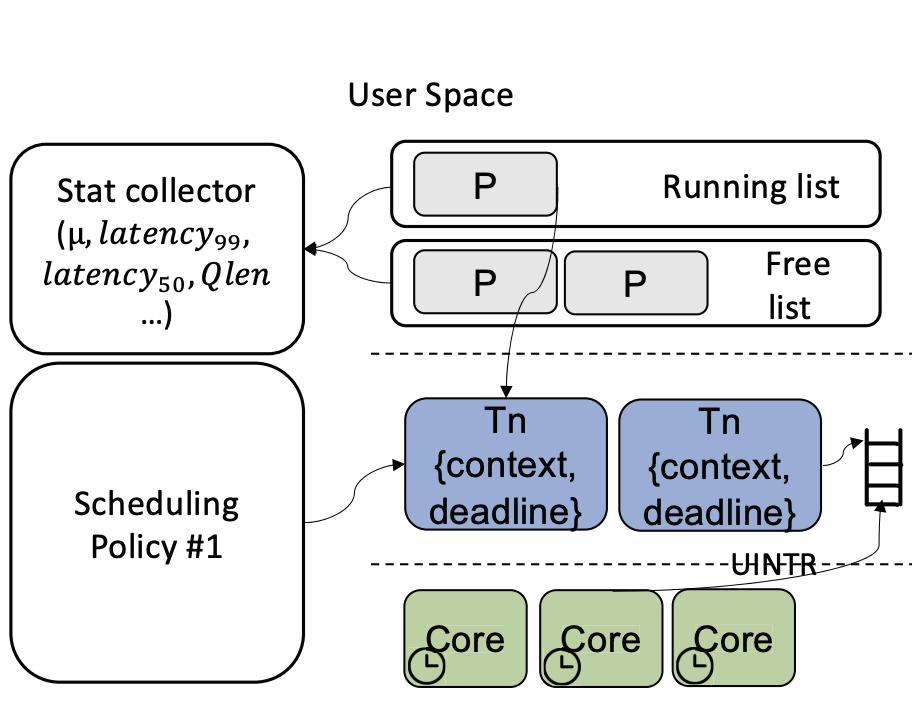
LibPreemptible: Enabling Fast, Adaptive, and Hardware-Assisted User-Space Scheduling
IEEE International Symposium on High-Performance Computer Architecture (HPCA), 2024